Lecture 8: Interpolation¶
Date: 09/26/2017, Tuessday
In [1]:
format compact
A simple example¶
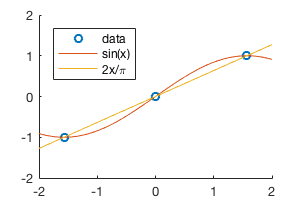
Make 3 data points
In [2]:
xp = [-pi/2, 0, pi/2];
yp = [-1, 0, 1];
The two functions below both go through the 3 data points.
In [3]:
f = @(x) sin(x);
g = @(x) 2*x/pi;
There are ways to plot a function symbolically/analytically (for example), but those methods have a lot of limitations and you don’t have detailed controls on them.
So we stick to the most standard way of plotting: evaluate the function value on a lot of points to make the line look smooth.
In [4]:
x = linspace(-2,2,1e3); % a 1000 grid points from -2 to 2
Always remember to surpress the output (by ;) when defining this
kind of large array. MATLAB WILL print all the elements in an
array/matrix no matter how large it is. Sometimes your program will die
just because it wants to print \(10^{10}\) numbers.
Now we can plot the functions and data points.
In [5]:
%plot --size 300,200
hold on
plot(xp,yp,'o')
plot(x,f(x))
plot(x,g(x))
legend('data','sin(x)','2x/\pi','Location','northwest')
Polynomial interpolation¶
In [6]:
% make some data points
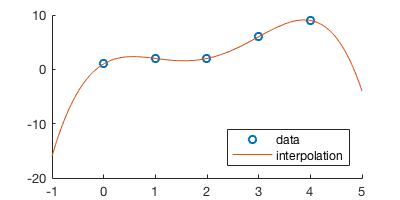
n = 5;
px = [0 1 2 3 4];
py = [1 2 2 6 9];
n data point can be precisely fitted by a n-1 degree polynomial \(p=c_1+c_2x+...+c_nx^{n-1}\).
The coffeicients \(c=[c_1,c_2,...c_n]^T\) satisfy the equation
where \(y=[y_1,y_2,...,y_n]^T\) is the data points you want to fit, and V is the vandermode matrix only containing powers of \(x_k\), the data points.
In [7]:
% calculate the vander matrix by loop
V = zeros(n);
for j=1:5
V(:,j) = px.^(j-1);
end
V
V =
1 0 0 0 0
1 1 1 1 1
1 2 4 8 16
1 3 9 27 81
1 4 16 64 256
The built-in vander is flipped left-right. Both forms are correct as
long as your algorithm is consistent with the matrix.
In [8]:
vander(px)
ans =
0 0 0 0 1
1 1 1 1 1
16 8 4 2 1
81 27 9 3 1
256 64 16 4 1
Now we can solve \(Vc=y\) by \(c=V^{-1}y\). In MATLAB backslash
form it is c=V\y. Note that the actual code never computes
\(V^{-1}\), but use something like LU factorization/Gaussian
elimination to solve the system. (it is almost always a bad idea to
compute the inverse of a matrix). But thinking about \(V^{-1}y\)
helps you to remember the order of V and y in the command (e.g. is it
V\y or y\V ?).
The code below throws an error because y is a row vector.
In [9]:
c = V\py
Error using \
Matrix dimensions must agree.
You need a column vector on the right side, just like how you write the equation mathematically.
In [10]:
c = V\py'
c =
1.0000
5.6667
-7.5833
3.3333
-0.4167
Now we have the coefficients \(c\), we can write the polynomial \(p=c_1+c_2x+...+c_nx^{n-1}\) as a MATLAB function.
Here’s a naive way to evaluate the polynomial. You should write a loop instead. Also consider Horner’s method to achieve optimal performance.
In [11]:
my_ploy = @(c,x) c(1) + c(2)*x + c(3)*x.^2 + c(4)*x.^3 + c(5)*x.^4 ;
In [12]:
% evaluate the function on a lot of data points
xf = linspace(-1,5,100);
yf = my_ploy(c,xf);
In [13]:
%plot --size 400,200
hold on
plot(px,py,'o')
plot(xf,yf)
legend('data','interpolation','Location','southeast')